AbstractQueuedSynchronizer是JUC包的基础,解决了同步器的细节问题(同步状态、FIFO队列),ReentrantLock、Semaphore、CountDownLatch等类都使用了AQS。
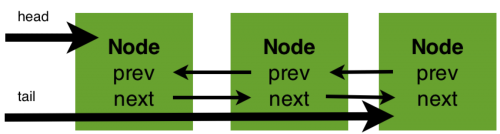
CLH lock
+------+ prev +------+ prev +------+
| | <---- | | <---- | |
head | Node | next | Node | next | Node | tail
| | ----> | | ----> | |
+------+ +------+ +------+
CLH锁通常用于自旋锁。AQS使用CLH的变种作为同步器。CLH节点数据结构如下。
static final class Node {
/** Marker to indicate a node is waiting in shared mode */
static final Node SHARED = new Node();
/** Marker to indicate a node is waiting in exclusive mode */
static final Node EXCLUSIVE = null;
/** waitStatus value to indicate thread has cancelled */
static final int CANCELLED = 1;
/** waitStatus value to indicate successor's thread needs unparking */
static final int SIGNAL = -1;
/** waitStatus value to indicate thread is waiting on condition */
static final int CONDITION = -2;
/**
* waitStatus value to indicate the next acquireShared should
* unconditionally propagate
*/
static final int PROPAGATE = -3;
volatile int waitStatus;
volatile Node prev;
volatile Node next;
/**
* The thread that enqueued this node. Initialized on
* construction and nulled out after use.
*/
volatile Thread thread;
// 存储condition队列中的后继节点
Node nextWaiter;
}
waitStatus是节点的状态。
- SIGNAL:-1。这个节点释放、或者取消的时候,要通过unpark操作通知后继节点。
- CANCELLED:1。节点由于超时或者中断,因此取消了。
- CONDITION:-2。这个节点处于条件队列。
- PROPAGATE:-3。releaseShared操作的时候要传递到其他节点。
- 0:其他。
对于普通同步节点,waitStatus初始化为0,如果是条件队列节点,则初始化为CONDITION。
AQS是由CLH node构建的双向链表,head、tail分别指向链表的头部、尾部。
private transient volatile Node head;
private transient volatile Node tail;
/**
* The synchronization state.
*/
private volatile int state;
留意state字段,子类使用state字段存储同步状态。
AQS入队
/**
* Creates and enqueues node for current thread and given mode.
*
* @param mode Node.EXCLUSIVE for exclusive, Node.SHARED for shared
* @return the new node
*/
private Node addWaiter(Node mode) {
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}
入队操作发生在tail:node.prev = pred。这里做了优化,假设入队竞争不大,先尝试检查和更新tail,失败才走完整的enq流程。
enq逻辑如下
private Node enq(final Node node) {
for (;;) {
// 入队发生在tail
Node t = tail;
if (t == null) { // Must initialize
// 由于AQS的head、tail节点使用了lazy init方式,
// 所以要先检查节点是否为null,并做初始化。
if (compareAndSetHead(new Node()))
tail = head;
} else {
// 设置入队节点的前驱为之前的tail
// 并且尝试原子化检查和更新tail
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
/**
* CAS head field. Used only by enq.
*/
private final boolean compareAndSetHead(Node update) {
return unsafe.compareAndSwapObject(this, headOffset, null, update);
}
/**
* CAS tail field. Used only by enq.
*/
private final boolean compareAndSetTail(Node expect, Node update) {
return unsafe.compareAndSwapObject(this, tailOffset, expect, update);
}
在一个无限循环中不停检查和重试更新tail,直至入队成功。 底层使用了Unsafe类,直接使用底层硬件提供的原子化操作,这里先不展开。
获取互斥锁
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
acquire是互斥方式获取锁,不支持中断。 tryAcquire是模板方法,由子类覆盖(ReentrantLock、Semaphore等)。 当尝试获取锁失败,则使用addWaiter把当前线程添加到CLH队列,并在循环中尝试。
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
// 当前节点的前驱是head,才尝试获取同步器
// tryAcquire是模板方法,由子类覆盖
if (p == head && tryAcquire(arg)) {
// 更新node为head
setHead(node);
p.next = null; // help GC
failed = false;
return interrupted;
}
// 判断是否要阻塞线程
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
有意思的是获取锁失败后,判断是否需要阻塞线程。
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
// 检查前驱节点的waitStatus
int ws = pred.waitStatus;
if (ws == Node.SIGNAL)
// 需要被阻塞
return true;
if (ws > 0) {
// ws > 0 即CANCELLED,往回找到非CANCELLED节点
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
/*
* waitStatus must be 0 or PROPAGATE. Indicate that we
* need a signal, but don't park yet. Caller will need to
* retry to make sure it cannot acquire before parking.
*/
// 其余情况设置为 SIGNAL
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
private final boolean parkAndCheckInterrupt() {
// 使用LockSupport阻塞当前线程
LockSupport.park(this);
return Thread.interrupted();
}
释放互斥锁
public final boolean release(int arg) {
// tryRelease是模板方法,由子类覆盖
if (tryRelease(arg)) {
// 在head释放锁
Node h = head;
if (h != null && h.waitStatus != 0)
unparkSuccessor(h);
return true;
}
return false;
}
private void unparkSuccessor(Node node) {
/*
* If status is negative (i.e., possibly needing signal) try
* to clear in anticipation of signalling. It is OK if this
* fails or if status is changed by waiting thread.
*/
int ws = node.waitStatus;
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
/*
* Thread to unpark is held in successor, which is normally
* just the next node. But if cancelled or apparently null,
* traverse backwards from tail to find the actual
* non-cancelled successor.
*/
Node s = node.next;
// 没有后继节点,或者已经CANCELLED
// 则需要从tail往回遍历,寻找当前节点的后继
if (s == null || s.waitStatus > 0) {
s = null;
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
if (s != null)
LockSupport.unpark(s.thread);
}
获取共享锁
public final void acquireShared(int arg) {
// tryAcquireShared是模板方法
if (tryAcquireShared(arg) < 0)
doAcquireShared(arg);
}
private void doAcquireShared(int arg) {
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
// 前驱是head,才尝试获取锁
if (p == head) {
int r = tryAcquireShared(arg);
if (r >= 0) {
setHeadAndPropagate(node, r);
p.next = null; // help GC
if (interrupted)
selfInterrupt();
failed = false;
return;
}
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
因为是shared模式,获取锁之后,可能要通知后面的节点
/**
* Sets head of queue, and checks if successor may be waiting
* in shared mode, if so propagating if either propagate > 0 or
* PROPAGATE status was set.
*
* @param node the node
* @param propagate the return value from a tryAcquireShared
*/
private void setHeadAndPropagate(Node node, int propagate) {
Node h = head; // Record old head for check below
setHead(node);
/*
* Try to signal next queued node if:
* Propagation was indicated by caller,
* or was recorded (as h.waitStatus either before
* or after setHead) by a previous operation
* (note: this uses sign-check of waitStatus because
* PROPAGATE status may transition to SIGNAL.)
* and
* The next node is waiting in shared mode,
* or we don't know, because it appears null
*
* The conservatism in both of these checks may cause
* unnecessary wake-ups, but only when there are multiple
* racing acquires/releases, so most need signals now or soon
* anyway.
*/
// propagate > 0:还有剩余,需要传递
// h.waitStatus < 0 :SIGNAL or PROPAGATE
if (propagate > 0 || h == null || h.waitStatus < 0 ||
(h = head) == null || h.waitStatus < 0) {
Node s = node.next;
if (s == null || s.isShared())
doReleaseShared();
}
}
释放共享锁
public final boolean releaseShared(int arg) {
// tryReleaseShared是模板方法
if (tryReleaseShared(arg)) {
doReleaseShared();
return true;
}
return false;
}
private void doReleaseShared() {
/*
* Ensure that a release propagates, even if there are other
* in-progress acquires/releases. This proceeds in the usual
* way of trying to unparkSuccessor of head if it needs
* signal. But if it does not, status is set to PROPAGATE to
* ensure that upon release, propagation continues.
* Additionally, we must loop in case a new node is added
* while we are doing this. Also, unlike other uses of
* unparkSuccessor, we need to know if CAS to reset status
* fails, if so rechecking.
*/
for (;;) {
// 在head释放锁
Node h = head;
if (h != null && h != tail) {
int ws = h.waitStatus;
// SIGNAL需要唤醒后续节点
if (ws == Node.SIGNAL) {
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
continue; // loop to recheck cases
unparkSuccessor(h);
}
// why 转为 PROPAGATE 状态?
else if (ws == 0 &&
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
continue; // loop on failed CAS
}
if (h == head) // loop if head changed
break;
}
}
Node.PROPAGATE
AQS源码比较难理解的是Node.PROPAGATE。javadoc对Node.PROPAGATE的解释
PROPAGATE: A releaseShared should be propagated to other
nodes. This is set (for head node only) in
doReleaseShared to ensure propagation
continues, even if other operations have
since intervened.
在共享模式下,可以认为资源有多个,因此当前线程被唤醒之后,可能还有剩余的资源可以唤醒其他线程。该状态用来表明后续节点会传播唤醒的操作。需要注意的是只有头节点才可以设置为该状态
找到一篇文章,对此思考比较深入,推荐阅读:AbstractQueuedSynchronizer源码解读
在AQS的共享锁中,一个被park的线程,不考虑线程中断和前驱节点取消的情况,有两种情况可以被unpark:一种是其他线程释放信号量,调用unparkSuccessor;另一种是其他线程获取共享锁时通过传播机制来唤醒后继节点。 可能会有队列中处于等待状态的节点因为第一个线程完成释放唤醒,第二个线程获取到锁,但还没设置好head,又有新线程释放锁,但是读到老的head状态为0导致释放但不唤醒,最终后一个等待线程既没有被释放线程唤醒,也没有被持锁线程唤醒。 PROPAGATE的引入是为了解决共享锁并发释放导致的线程hang住问题。
setHeadAndPropagate()
if (propagate > 0 || h == null || h.waitStatus < 0 ||
(h = head) == null || h.waitStatus < 0) {
Node s = node.next;
if (s == null || s.isShared())
doReleaseShared();
}
doReleaseShared()
else if (ws == 0 &&
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
continue; // loop on failed CAS
AQS和Condition
AQS提供了ConditionObject,实现了条件队列。具体参见
小结
- AQS使用CLH节点,构建双向链表
- AQS提供了模板方法(tryXXX,例如tryRelease、tryAcquire),由子类覆盖
- AQS支持互斥锁、共享锁、条件队列
- 在tail增加等待线程
- 在head获取锁、释放锁
- 使用unsafe类CAS更新head、tail
- 释放锁且Node.SIGNAL,则要通过unparkSuccessor唤醒后续节点
- 对于共享锁,为了解决并发释放导致线程hang的情况,增加了Node.PROPAGATE。
- 只有head节点才可以设置为PROPAGATE状态