记得第一次在microk8s上运行容器,遇到pause容器无法拉取镜像的问题。今天了解下这个pause容器的用途。
pod & pause container
我们知道,Pod是kubernetes中最基本的应用执行单元。代表一个在k8s集群运行的进程。 在Kubernetes集群中Pod有如下两种使用方式:
- 一个Pod中运行一个容器。“每个Pod中一个容器”的模式是最常见的用法。
- 在一个Pod中同时运行多个容器。一个Pod中也可以同时封装几个需要紧密耦合互相协作的容器,它们之间共享资源。Pod将这些容器的存储资源作为一个实体来管理。
可见,Kuberentes管理的是Pod而不是直接管理容器。
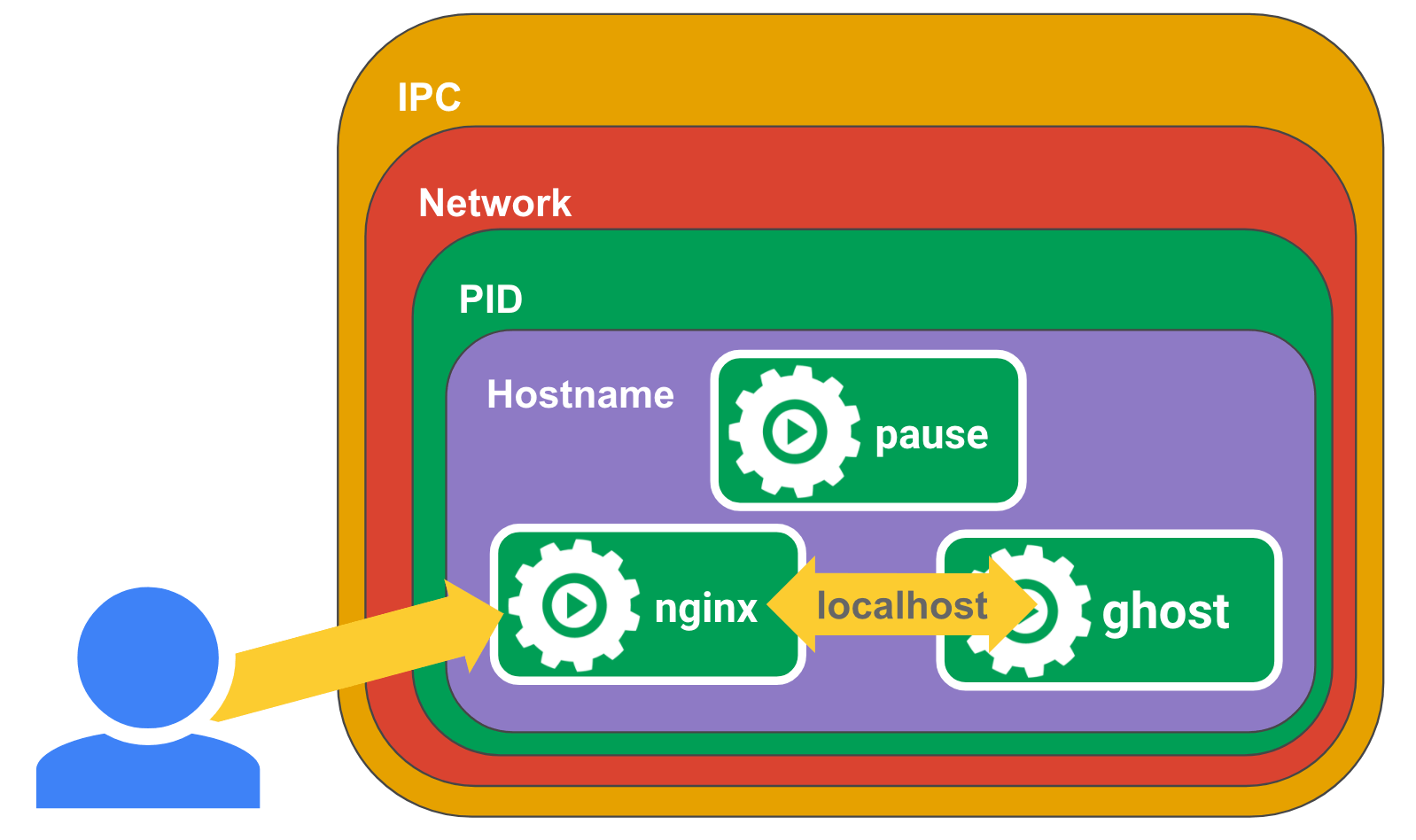
容器化的好处之一是资源隔离,不同容器的进程不会相互干扰;底层实现技术是linux namespace和cgroup。 但是另一方面,不同容器的进程可能需要访问其他容器的资源,才能协同工作。在kubernetes中, pause容器作为pod中其他容器的父容器,实现了2个功能:
- 共享namespace
- 作为每个pod的PID=1的进程,用于回收僵尸进程
linux namespace sharing
在linux中,新建一个进程,默认继承父进程的namespace。如果要在新的namespace中运行进程,可以使用unshare命令:
sudo unshare --pid --uts --ipc --mount -f chroot rootfs /bin/sh
当进程运行后,可以使用setns系统调用,把其他进程添加到这个namespace,从而形成一个pod。
docker提供了管理namespace的便捷方法。
首先新建一个pause容器。
docker run -d --name pause -p 8080:80 gcr.io/google_containers/pause-amd64:3.0
然后运行ghost容器,并且加入到pause容器的namespace。
docker run -d --name ghost --net=container:pause --ipc=container:pause --pid=container:pause ghost
这里的--net、--ipc、--pid作用与unshare命令类似。
僵尸进程,孤儿进程
僵尸进程:
- 一个进程使用fork创建子进程,如果子进程退出,而父进程并没有调用wait或waitpid获取子进程的状态信息,那么子进程的进程描述符仍然保存在系统中。这种进程称之为僵尸进程。
孤儿进程:
- 父进程退出,而它的一个或多个子进程还在运行,那么那些子进程将成为孤儿进程。孤儿进程将被init进程(进程号为1)所收养,并由init进程对它们完成状态收集工作。
僵尸进程的危害:
- 僵尸进程会占用进程号,但是系统所能使用的进程号是有限的,如果大量的产生僵死进程,将因为没有可用的进程号而导致系统不能产生新的进程。
处理僵尸进程/孤儿进程的方法:
- 父进程可调用wait/waitpid函数回收其僵尸子进程。
- init进程回收法。
父进程回收的问题:需要父进程去等待子进程。通常情况下,父进程要执行自己的逻辑,不会阻塞等待。另外,父进程crash,导致不能回收。 init进程避免了父进程回收的缺陷:
- 如果父进程先于子进程结束,那么子进程的父进程自动改为 init 进程。
- 如果 init 的子进程结束,则 init 进程会自动回收其子进程的资源而不是让它变成僵尸进程。
pause 容器
在linux系统中,由init进程处理僵尸进程问题。 在kubernetes中,容器进程可能fork子进程,进而导致潜在的僵尸进程问题。因此引入了pause容器来执行init进程的职责。同时也承担了namespace sharing的作用。 pause容器源码很简单,核心功能是休眠(pause)。
#include <signal.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
static void sigdown(int signo) {
psignal(signo, "Shutting down, got signal");
exit(0);
}
static void sigreap(int signo) {
while (waitpid(-1, NULL, WNOHANG) > 0);
}
int main() {
if (getpid() != 1)
/* Not an error because pause sees use outside of infra containers. */
fprintf(stderr, "Warning: pause should be the first process\n");
if (sigaction(SIGINT, &(struct sigaction){.sa_handler = sigdown}, NULL) < 0)
return 1;
if (sigaction(SIGTERM, &(struct sigaction){.sa_handler = sigdown}, NULL) < 0)
return 2;
if (sigaction(SIGCHLD, &(struct sigaction){.sa_handler = sigreap,
.sa_flags = SA_NOCLDSTOP},
NULL) < 0)
return 3;
for (;;)
pause();
fprintf(stderr, "Error: infinite loop terminated\n");
return 42;
}